狭小空間点検ロボットとは? おすすめメーカーや作業場所・形状による種類分けも解説
狭くて人が入り込めない床下や配管内部、インフラ設備のすき間など、点検が困難な場所を効率的かつ安全に点検できる狭小空間点検ロボット。
本記事では、狭小空間点検ロボットの基本的な定義から、種類別の特徴、導入時の選び方、そしておすすめメーカーの比較まで、導入検討時に必要な情報を網羅的に解説しています。
「どんなタイプの狭小空間点検ロボットを選べばいいのか」「実績のあるメーカーはどこか」といった疑問を解決する一助となる記事です。
点検業務の効率化・安全性向上・コスト削減を実現するための第一歩として、ぜひ本記事をお役立てください。
狭小空間点検ロボット以外にも、点検ロボットには、インフラ点検ロボットやプラント点検ロボット等があります。点検ロボット全般について詳しく知りたい方は、以下の記事をご覧ください。
狭小空間点検ロボット全製品(1件)
 タイル形式
タイル形式 リスト形式
リスト形式
1-1 / 1件
| 製品 | 詳細情報 |
|---|---|
|
🏆注目
241人が閲覧しました
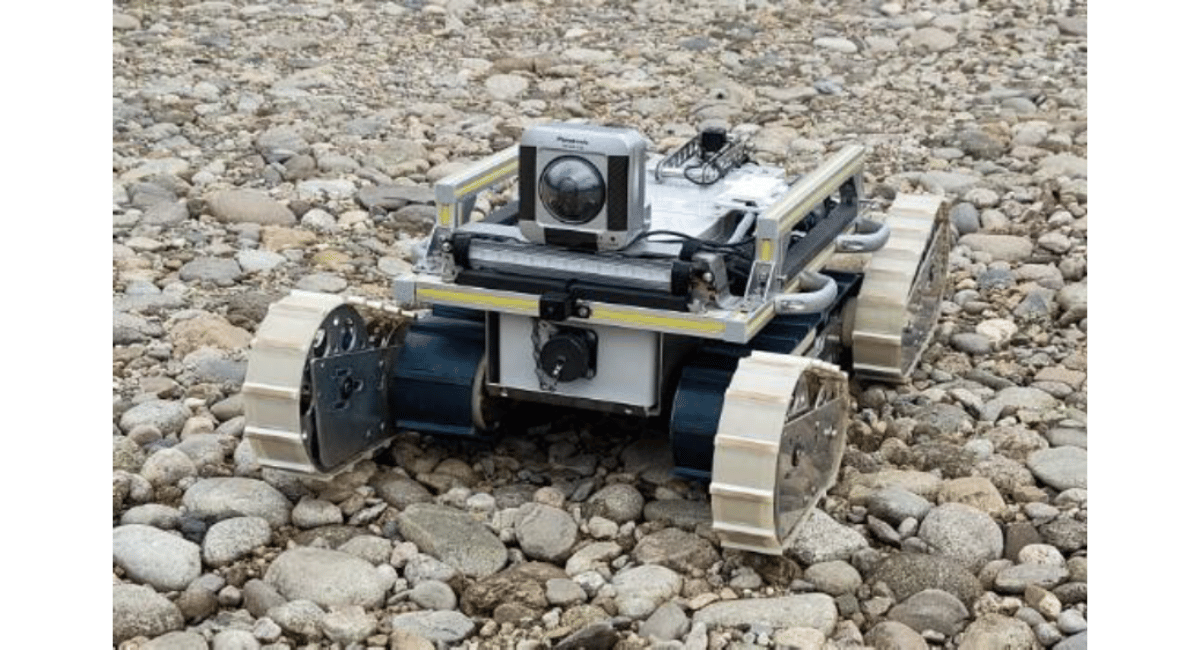
メーカー:サンリツオートメイション株式会社特徴:災害対応ロボットの技術を応用したクローラにより、ゲームコントローラの遠隔操作で傾斜35度の路面、高さ20cmの段差などの悪路を走破 防塵防水性能IP67、巻き込んだ砂や泥等は自動で排出する機能を搭載し、水深20cmまでの浸水路走行を想定 鮮明なHD画質、パン/チルト操作で任意の位置を間接目視できる、クラック等の細かな変状の確認を想定した監視カメラ搭載 |
1-1 / 1件
狭小空間点検ロボットのカタログ(1件)
導入などでお困りでしたら以下からお気軽にご相談ください。
※JET-Roboticsの問い合わせフォームに遷移します。
一部の会社とは正式な提携がない場合がありますが、皆さまに最適なご案内ができるよう努めています。
狭小空間点検ロボットの基礎知識や導入のポイントについては、以下の解説をご覧ください。
狭くて人が入り込めない床下や配管内部、インフラ設備のすき間など、点検が困難な場所を効率的かつ安全に点検できる狭小空間点検ロボット。
本記事では、狭小空間点検ロボットの基本的な定義から、種類別の特徴、導入時の選び方、そしておすすめメーカーの比較まで、導入検討時に必要な情報を網羅的に解説しています。
「どんなタイプの狭小空間点検ロボットを選べばいいのか」「実績のあるメーカーはどこか」といった疑問を解決する一助となる記事です。
点検業務の効率化・安全性向上・コスト削減を実現するための第一歩として、ぜひ本記事をお役立てください。
※JET-Roboticsの問い合わせフォームに遷移します。
一部の会社とは正式な提携がない場合がありますが、皆さまに最適なご案内ができるよう努めています。
狭小空間点検ロボット以外にも、点検ロボットには、インフラ点検ロボットやプラント点検ロボット等があります。点検ロボット全般について詳しく知りたい方は、以下の記事をご覧ください。
最近の更新内容
2026/1/23更新 企業情報の更新
目次
狭小空間点検ロボットとは?定義や用途を紹介

狭小空間点検ロボットとは、人が立ち入ることが困難な床下や配管、天井裏などの狭い空間に入り込み、内部の異常や劣化を点検するために使用されるロボットです。
主にカメラやセンサーを搭載しており、遠隔操作で内部状況を映像・数値データとして確認できます。
狭小空間点検ロボットの用途としては、住宅の床下点検、工場の配管点検、インフラ設備や発電機の隙間、歴史的建築物の調査など多岐にわたり、作業の安全性向上や省人化の面で注目されています。
また、狭小空間点検ロボットと一口に言ってもいくつかの種類に分類可能です。次章では、これらの種類を解説します。
細かく種類まで理解しておくことで、実際に狭小空間点検ロボットを選ぶ際に、適切な製品を選びやすくなります。ぜひご覧ください。
狭小空間点検ロボットを種類ごとに解説

狭小空間点検ロボットは「どの狭小空間を点検するか」と「どの様な形状をしているか」という2つの観点から、種類分けされます。
まずは、「どの狭小空間を点検するか」から見ていきます。
どんな狭小空間を点検するかでの種類分け
定期的な点検が求められ、人間が入りにくい狭小空間はいくつか存在します。
その中でもロボットを使って、点検が行われている狭小空間は主に以下です。
床下点検ロボット
住宅や施設の床下に入り込み、湿気、カビ、配管の破損などを点検する狭小空間点検ロボットです。比較的水平な構造を持ち、狭い床下空間を安定して走行できるよう設計されています。
配管点検ロボット
長く入り組んだ配管の内部に挿入して、劣化や詰まりの有無を確認するための狭小空間点検ロボットです。柔軟なボディや小径設計により、直角に曲がるような配管内部でもスムーズに移動できます。
狭小空間点検ロボットが点検可能なその他の場所
狭小空間点検ロボットは、床下や配管以外にも、以下のような狭小空間での点検に活用されています。
- 天井裏
- 発電機の隙間
- 壁内の空洞
梁や断熱材の劣化、配線の確認などに使用
発熱機器周辺の異常検知や振動状態のモニタリングに有効
リフォームや耐震診断時の内部状況調査にも利用される
対象空間ごとに異なる仕様が求められるため、用途に応じた機種選定が重要です。
ロボットの形状での種類分け
次に、「どの様な形状をしているか」の種類分けを解説します。
クローラー型
ベルト状のクローラーで走行するタイプで、段差や障害物がある環境でも安定した移動が可能な狭小空間点検ロボットです。高い走破性を求められる床下や屋外での点検に向いています。
ヘビ型
関節構造を持ち、くねくねと曲がりながら前進できる狭小空間点検ロボットです。特に配管の中や構造物の隙間など、入り組んだ経路でも柔軟に対応できます。
クモ型
複数の足で歩行するタイプの狭小空間点検ロボットで、段差を越えたり不整地でも動作可能です。天井裏や障害物の多い場所での使用に適しています。
以上が、狭小空間点検ロボットの種類分けです。各種類の特徴がつかめたところで、次章では、実際に狭小空間点検ロボットがどんな場面で使われているのかを見ていきましょう。
具体的な活用事例を紹介
狭小空間点検ロボットは、すでにいたるところで活用が進んでいます。以下では、その一例を紹介します。
住宅の床下点検
戸建住宅や集合住宅では、湿気や白蟻、配管の劣化確認のために床下の点検が必要とされます。
従来は作業員が潜る必要がありましたが、狭小空間点検ロボットの導入により、遠隔から高精度な映像とともに点検を行えるようになりました。
これにより、作業負担とリスクの軽減に加え、点検時間の短縮にもつながっています。
工場設備の配管点検
工場内部の複雑な配管網では、経年劣化や液漏れの検知が課題です。
ヘビ型やクローラー型の狭小空間点検ロボットが、配管内部や狭い配管裏側へ自在に進入し、カメラや温度センサーで異常箇所を可視化します。
点検記録はデジタルデータとして保存され、保全履歴としての活用も可能です。
インフラ構造物の内部点検
狭小空間点検ロボットは、上下水道、共同溝、橋梁の内部など、人が入るには危険なインフラの点検にも活用されています。
ロボットが長距離を自律走行し、管内のひび割れや閉塞状況を連続的に撮影・記録します。
特に自治体やメンテナンス企業において、人的コスト削減や安全性向上の手段として導入が主です。
発電機や電力機器の隙間点検
発電設備では、発電機下部やケーブル経路など極めて狭く高温になる空間が存在します。耐熱性・耐振動性を備えた狭小空間点検ロボットにより、点検精度を落とさず安全に作業を実施可能です。
トラブル発生時の迅速な状況把握にも活用され、保守業務の効率化に寄与しています。
車両・航空機の点検
車両や航空機では、エンジンルームや構造体の隙間点検が重要ですが、目視が困難な領域も多いです。狭小空間点検ロボットにより、点検効率と精度が向上し、定期整備の信頼性も高まりました。
映像記録を活用した予兆保全の取り組みも進んでいます。
次章では、実際に自社で導入する狭小空間点検ロボットを選定する際に役立つ、狭小空間点検ロボットの選び方を解説します。
狭小空間点検ロボットの選び方

ここまで解説してきた通り、狭小空間点検ロボットには様々な種類があります。そのため、自社に適した製品を選ぶためには、適切な選び方を知っておく必要があります。
本章を読んで、狭小空間点検ロボットの適切な選び方を理解しておきましょう。
形状・サイズの適合性で選ぶ
狭小空間点検ロボットの選定において、点検対象となる口径や配管の曲率に対して、ロボットの外形寸法や形状が適合しているかを確認することは重要です。
この選び方は、設備図面などで把握した開口寸法や配管の曲率、内部の障害物の有無といった要素をもとに、クローラー型・蛇型といったロボット形状の可動域や折り畳み機構、クローラー幅といった仕様によって決定されます。
形状やサイズが適合しない狭小空間点検ロボットを選定してしまうと、曲がり角や段差を越えることができず、ロボットの投入そのものが不可能となります。これにより、追加工事や設備の一時停止が必要になり、コストや工期が増加するリスクもあるでしょう。
とくに、急な曲がりが多い長尺の配管や、段差の多い床下など、人手による回収が困難な環境では、この選び方が重要になります。
適切な形状とサイズの狭小空間点検ロボットを選定できれば、複雑な経路でもスムーズに走行でき、点検作業の時間短縮と作業員の安全性向上を同時に実現可能でしょう。
撮影・照明性能で選ぶ
暗所での点検や微細な欠陥を見逃さないためには、狭小空間点検ロボットのカメラの解像度や視野角、さらに高演色LED照明の出力が、要求される精度に合致しているかを確認することが大切です。
これは、想定される最小欠陥サイズ、点検対象の内部表面材質の反射率、そしてロボットが供給できる電力容量といった技術的要因に左右されます。
もし撮影や照明性能が不足していると、表面の亀裂や腐食といった重要な劣化兆候を見逃してしまい、その結果として事故や高額な補修が必要になるリスクが高まります。
とくに、暗く湿度の高い床下や、錆びの進行した配管内部など、肉眼での確認が困難な環境では、この選定基準が大事でしょう。
必要な撮影機能を備えた狭小空間点検ロボットを選ぶことで、一次点検の段階で微細な劣化まで把握できるようになり、長期的な保全計画の精度を高めることが可能でしょう。
通信方式で選ぶ
金属で囲まれた閉鎖空間や長距離の配管内での点検では、狭小空間点検ロボットとの通信途絶を防ぐために、テザーケーブル式か中継アンテナを搭載した無線式かを、通信距離や障害物の有無に応じて選定する必要があります。
この判断は、通信経路の距離や屈曲数、点検対象の材質による電波の減衰具合、ケーブルを取り回すための空間の有無、そして搭載できるバッテリー容量などの要因によって決まります。
通信方式を適切に選定できないと、映像の伝送が途中で途切れて制御が不能になり、結果として現場での回収作業や再点検の必要が生じ、作業時間が延びてしまう可能性もあるでしょう。
特に、長尺の配管内部や多層構造の床下など、操作者の視界の外で走行し、迅速なトラブル対応が求められる環境では、この選び方の重要性が増します。
適切な通信方式の狭小空間点検ロボットを選択できれば、リアルタイムの映像をもとに的確な指示を出すことができ、点検作業の効率と確実性が向上するでしょう。
自社が導入するべき、狭小空間点検ロボットのイメージはついたでしょうか?最適な製品を選ぶためにも、まずは自社の導入目的や導入環境を整理することをおすすめします。
次章では、狭小空間点検ロボットのおすすめメーカーを4社紹介します。気になるメーカーがある場合は問い合わせをしてみてください。
【編集部おすすめ】狭小空間点検ロボットのメーカーを紹介!

本章では、狭小空間点検ロボットのおすすめメーカーをピックアップして紹介します。各企業の情報を比較して、各社の強みも解説しているので、ぜひご覧ください。気になるメーカーがある場合は、以下のボタンからJET-Roboticsにお問い合わせください。
まずは、JET-Robotics担当者がヒアリングさせていただきます。
※JET-Roboticsの問い合わせフォームに遷移します。
一部の会社とは正式な提携がない場合がありますが、皆さまに最適なご案内ができるよう努めています。
- サンリツオートメイション / Sanritz Automation
- 大和ハウス工業 / DAIWA HOUSE INDUSTRY
- 産業技術総合研究所 / AIST
※クリックで各メーカーの詳細に飛びます。
サンリツオートメイション / Sanritz Automation
| 会社名 | サンリツオートメイション / Sanritz Automation |
| 設立年 | 1971年 |
| 本社 | 東京都町田市南成瀬4-21-9 |
| 概要 | 様々なコンピュータ・システムを産業用アプリケーション分野に提供 |
サンリツオートメイションは「思いやりのある未来社会を実現する価値創造」を掲げながら、組込みコンピュータ技術でお客様の困りごとの解決をお手伝いする開発型メーカーです。産業用コンピュータ・システムの専業メーカーとして、他社が作っていないものを作ること・他社が取組まない分野で特化した能力を持つことに挑戦しています。
狭小空間点検ロボットは、監視点検用クローラロボット「ARTHUR」を展開しています。立入困難・安全ではない場所の困りごとを解決してくれるARTHURは、カスタマイズにより高機能化・最適化することができます。段差、がれき、泥などの悪路の走破性に優れているほか、屋外作業を想定した耐水クローラ仕様であることも特徴です。
上記のような特徴から、階段の登坂、浸水路の走破、立入困難設備の内部の調査などができます。変状が鮮明に見える監視カメラを搭載しており、クラック等の細かな変状を確認することが可能です。
大和ハウス工業/DAIWA HOUSE INDUSTRY
日本初のプレハブ住宅を生み出した先駆者として知られ、住宅・建築分野での長年の実績があります。同社が展開する狭小空間点検ロボットは「moogle」と「moogle evo」です。高精細カメラで幅0.1mmの微細なクラックを検出できるうえ、検出箇所を自動で色分け表示する機能を備えており、従来製品比約4倍の解像度で撮影可能です。そのため、住宅メーカーや工務店、建設会社からゼネコンまで、さまざまな業界で導入が進んでいます。
産業技術総合研究所/AIST
産業界や社会課題に直結する応用研究を強みとし、高度な技術の実用化を推進しています。同研究所が開発した狭小空間点検ロボットは「DIR-3」と呼ばれています。独自のコの字型アーム機構により、自重の1.5倍(約18cm)もの段差を自動で昇降できる点が特徴です。家屋の床下や上下水道、災害現場まで多様な現場で実証導入され、幅広い分野での有効性が確認されています。
導入などでお困りでしたら以下からお気軽にご相談ください。
※JET-Roboticsの問い合わせフォームに遷移します。
一部の会社とは正式な提携がない場合がありますが、皆さまに最適なご案内ができるよう努めています。