【2026年最新】エンドエフェクタとは? 特徴・種類や選び方、おすすめのメーカーを紹介
ロボットが活躍する製造現場で、作業の要となるエンドエフェクタ。ワークを把持したり、検査・溶接・加工を行ったりと、その機能や特性によって生産性や品質が左右されます。
しかし、いざ導入を検討すると「種類が多くてどれを選べばいいのか分からない」「具体的なメリット・デメリットを知りたい」という悩みに直面する方も多いのではないでしょうか。
この記事では、エンドエフェクタとは何かの説明や種類、選び方、活用事例、そしておすすめメーカー情報までを紹介します。
エンドエフェクタ全製品(6件)
 タイル形式
タイル形式 リスト形式
リスト形式
1-6 / 6件


| 製品 | 詳細情報 |
|---|---|
|
🏆注目
171人が閲覧しました
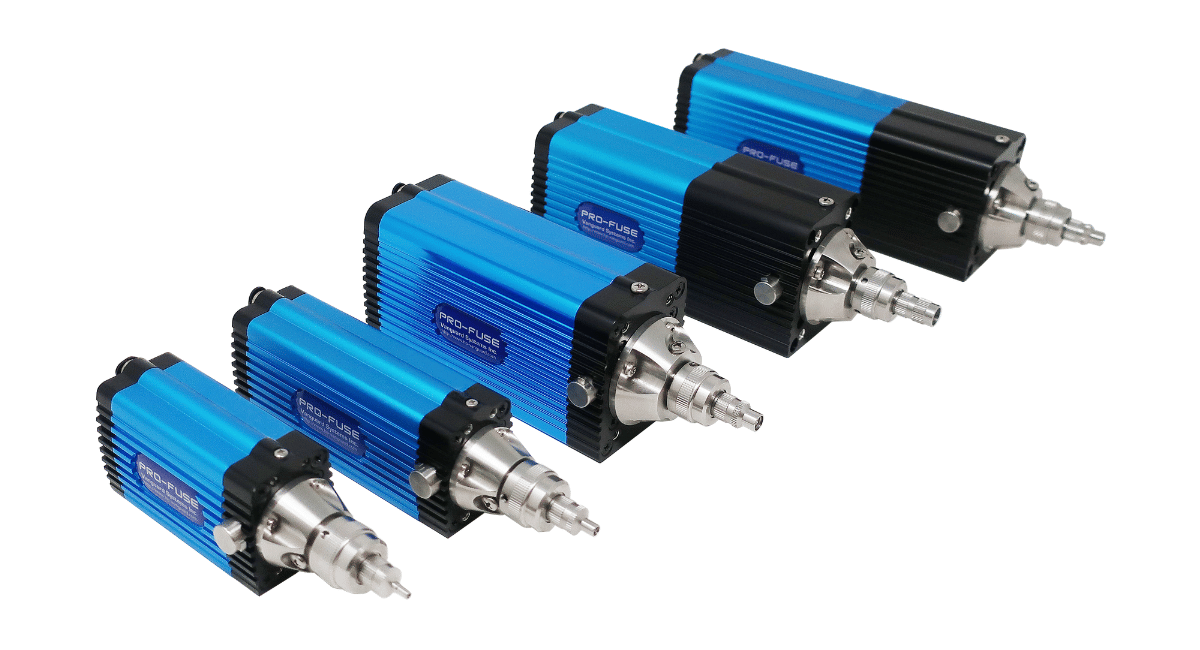
メーカー:株式会社バンガードシステムズ特徴:締付トルク10mN・mから最大3200mN・mまで対応。微細ねじから各種材質まで安定した締結品質を実現 小型・軽量設計によりロボット先端への搭載負荷を低減し、装置設計の自由度向上に貢献 使用するねじに合わせたビットカスタマイズに対応。品質管理を支えるトルクチェッカーもご用意 製品ラインナップとトルク範囲 JET-Roboticsにお問い合わせ |
|
|
🏆注目
159人が閲覧しました
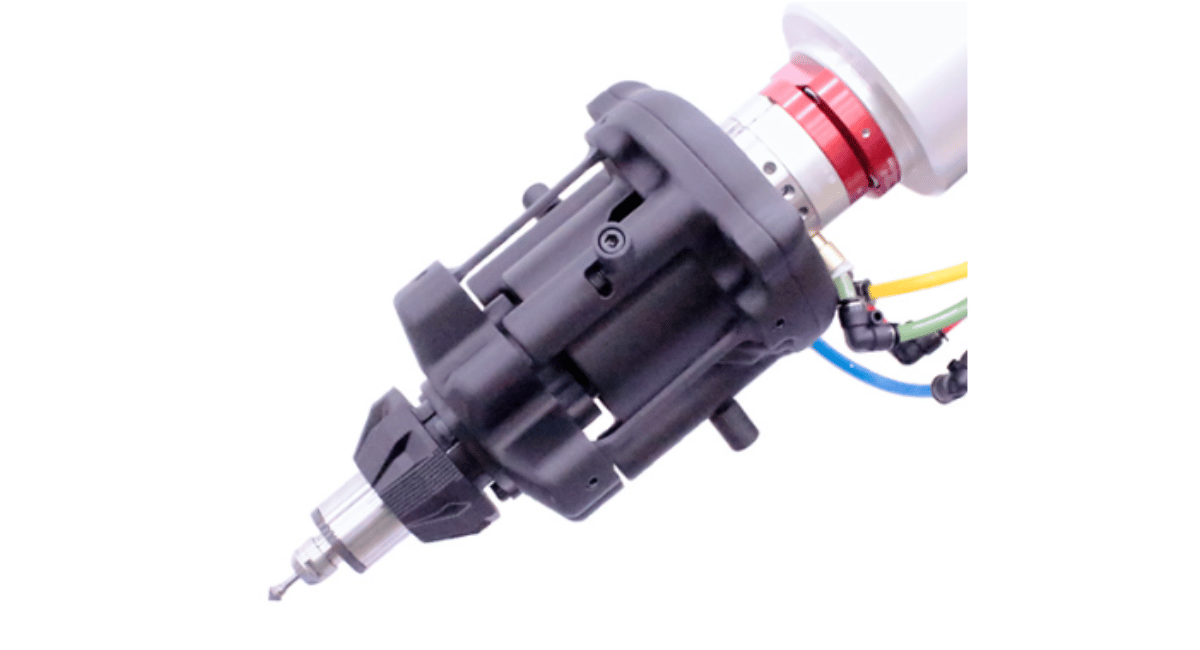
メーカー パナソニック株式会社 エレクトリックワークス社特徴:低反力・高出力で小型協働ロボット※1にも接続可能 締付作業データー(トルク値、波形、作業時間など)を無線で記録可能 無線通信制御で「ボルトかじり検出」※2など、各種作業アシスト機能の設定が可能 ※1:ブラケットの形状、締付条件によって対応できるロボットは異なるため、実作業での事前確認が必要です。 ※2:実際の作業では、周囲条件(締付ボルト・部材・固定方法等)により、変化します。実作業での事前確認が必要です。 |
|
|
🏆注目
162人が閲覧しました
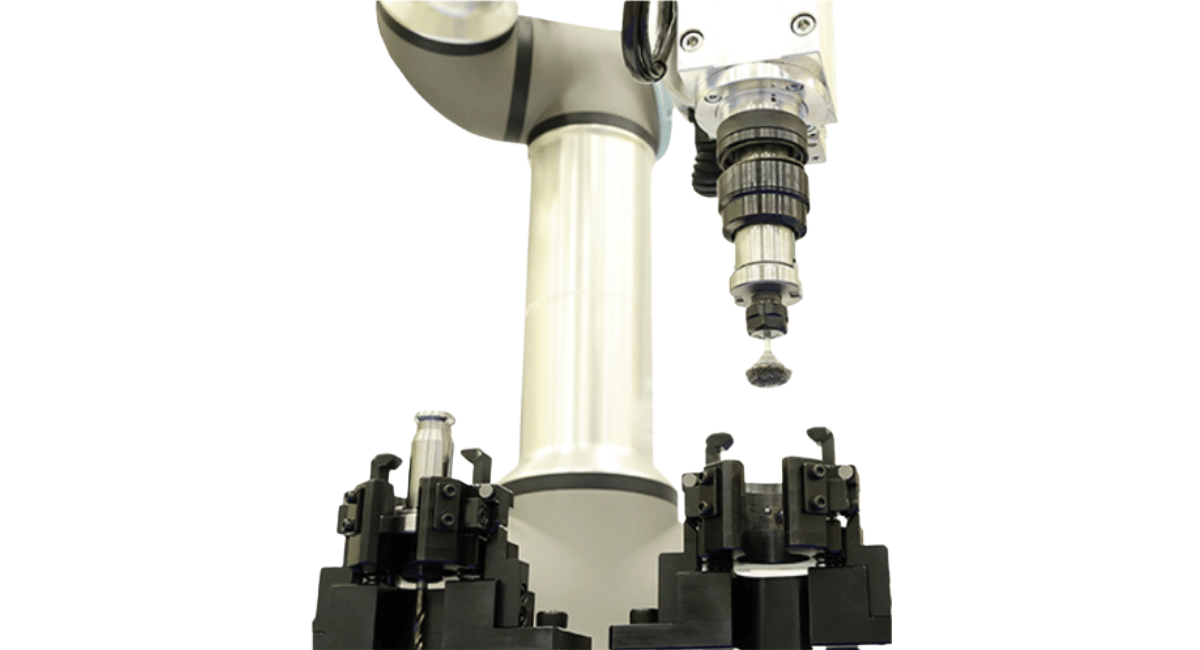
メーカー:トークシステム株式会社特徴:直線移動のクランプ・アンクランプを力を入れずにワンタッチで行えるロック機構です。 エアを供給するとシャフトをアンクランプ、遮断するとシャフトをクランプします 固定の間、電気・エアの動力不要(カラクリ機構採用) 両端のリニアプッシュにより、かんたんにユニット化が可能 動作保証は50万回、摩耗ほぼなし ならいユニットの機構に用いれば、1ユニットで複数のワークを扱えるロボットハンドを製作可能。吸着(写真2枚目)・搬送・把持(写真3枚目)(写真の2枚目、3枚目に使用しているのはクイッククランパーエレメントです) |
|
|
309人が閲覧しました
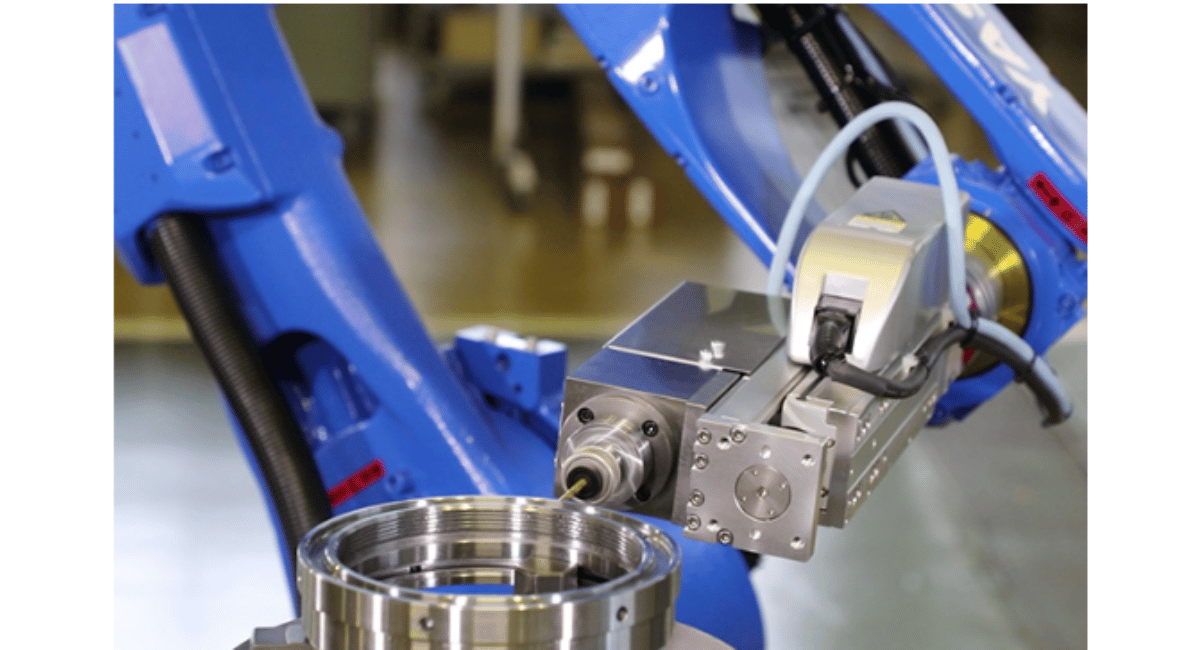
メーカー / 代理店:富士精工株式会社特徴:高フロート量で複雑ワークにも追従し、安定してバリを除去 軽量ボディで可搬重量が小さいロボットアームにも対応 90%オーダーメイドで作成しているのでワークに応じて最適なエンドエフェクタをご提案 |
|
|
235人が閲覧しました
メーカー / 代理店:富士精工株式会社特徴:高複数のハンドチェンジャー不要で投資削減に貢献 動力源不要で簡単ツールチェンジ ワークに応じて最適なサイズをご提案 JET-Roboticsに問い合わせる |
|
|
246人が閲覧しました
メーカー / 代理店:富士精工株式会社特徴:小型化と軽量化を追求し、ロボットに取付可能なスピンドルを開発 ロボットの用途を広げられるほか、省人化によるコスト低減に貢献 90%オーダーメイドで作成しているのでワークに応じて最適なエンドエフェクタをご提案 JET-Roboticsに問い合わせる |
1-6 / 6件
エンドエフェクタのカタログ(2件)
導入などでお困りでしたら以下からお気軽にご相談ください。
※JET-Roboticsの問い合わせフォームに遷移します。
一部の会社とは正式な提携がない場合がありますが、皆さまに最適なご案内ができるよう努めています。
エンドエフェクタの基礎知識や導入のポイントについては、以下の解説をご覧ください。

ロボットが活躍する製造現場で、作業の要となるエンドエフェクタ。ワークを把持したり、検査・溶接・加工を行ったりと、その機能や特性によって生産性や品質が左右されます。
しかし、いざ導入を検討すると「種類が多くてどれを選べばいいのか分からない」「具体的なメリット・デメリットを知りたい」という悩みに直面する方も多いのではないでしょうか。
この記事では、エンドエフェクタとは何かの説明や種類、選び方、活用事例、そしておすすめメーカー情報までを紹介します。
とりあえずロボットに詳しい人から話を聞きたいという方や、既にどうするかを決めている方は、以下のボタンからJET-Roboticsにお問い合わせください。専門家にお繋ぎします。
※JET-Roboticsの問い合わせフォームに遷移します。
※一部メーカーとは提携がない場合がありますが、ユーザー様に最適なご案内ができるよう努めています。
最近の更新内容
2026/3/5更新 コンテンツの一部修正と追加
【2026年最新情報】進化するエンドエフェクタのトレンド
ロボットの性能向上に合わせ、エンドエフェクタも日々アップデートされています。ここでは、エンドエフェクタに関するトレンドをピックアップしました。
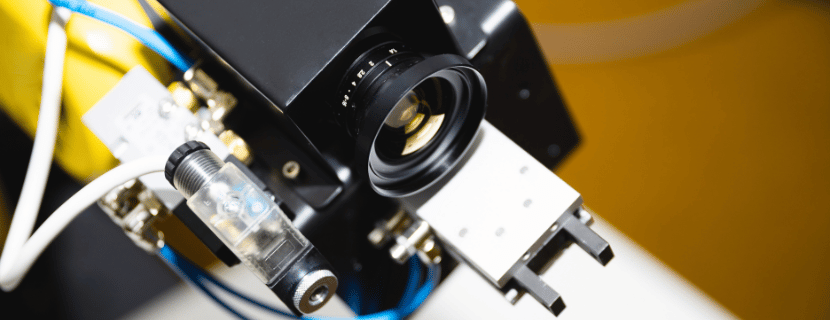
1. AI・ビジョンシステムとの融合
- 高度なピッキング:3Dビジョンがバラ積み部品の姿勢を認識し、最適角度・力で掴む動作を自動化。
- 自動検査・品質管理:内蔵カメラやセンサで外観・寸法を瞬時にチェック、AIで良否判定し品質を平準化。
2. 「ソフトグリッパー」の台頭
柔らかく傷つきやすいワークを優しく包み込む用途で採用が加速。食品、化粧品、医療消耗品などで効果的です。
3. 協働ロボット向け「プラグアンドプレイ」
コネクタ接続と簡単設定で即戦力化できるエコシステムが拡大。代表例として OnRobot、Robotiq などがグリッパ・センサ・ツールチェンジャを包括提供しています。
その他の注目動向
- 力覚・触覚の統合:はめ合い・研磨・バリ取りの安定度が向上。
- AMR×ロボットの協調:搬送とピッキングをシームレス化しレイアウト自由度が向上。
- 省エネ真空:エアセーブ制御やリーク監視で消費エアを大幅削減。
- デジタルツイン/トレース:把持・締結ログを製番と紐付け、後追い保証と予防保全に活用。
エンドエフェクタとは? 基本的な役割や特徴を解説
エンドエフェクタとは、ロボットアームの最先端部分に取り付けられるツールや装置で、ロボットが物体を操作したり、作業を実行するために使用されるロボットの周辺機器の一つです。
人間でいうと“手や指”の役割にあたり、そのロボットが何を行うのかを決める重要な部品となります。
エンドエフェクタは、ロボットが実行する作業内容によって異なります。例えば、物を掴むためのグリッパーや、物体を加工・操作するためのツールなどがあり、それぞれが特定の機能を持っています。
エンドエフェクタの主な役割
エンドエフェクタには、以下のような役割があります。
- 物を掴む・保持する
ロボットが物体をつかんで移動させる役割を担います。これには、物体の形状や重さ、材質に応じた設計が必要です。 - 物体を加工する
エンドエフェクタは物体を単に掴むだけでなく、加工することもできます。 - 作業を実行する
エンドエフェクタには、ピッキング、組み立て、包装、検査、計測など、さまざまな作業を実行するものがあります。
特徴
また、エンドエフェクタは作業環境や取り扱う物体の特性に応じて設計され、以下のような特徴があります。
- 柔軟性
エンドエフェクタは多様な作業に対応できる設計が可能で、複数の作業をこなすことができます。例えば、製造ラインにおける部品の組み立てや、食品の包装など、業界に応じたカスタマイズが可能です。 - 精度
高精度な操作が要求される作業に対応できるエンドエフェクタは、ミリ単位での位置決めや動作が求められる場面でも活躍します。 - 適応力
様々な物体や作業内容に応じて、エンドエフェクタを変更したり調整したりすることができます。
ここまで、エンドエフェクタの基本的な情報を解説しました。次の章では上記のような特徴を持つエンドエフェクタが、どのような場所で活躍しているのかを紹介します。
エンドエフェクタの活用事例を解説
エンドエフェクタは、ロボットによる自動化の中核を担う重要な機器であり、製造業をはじめさまざまな業界で活用されています。
この章では、エンドエフェクタの具体的な活用事例をいくつか紹介し、その効果や導入のポイントについて解説します。
1. 自動車業界におけるエンドエフェクタの活用
自動車業界では、エンドエフェクタが生産ラインの効率化に貢献しています。
例えば、トヨタやフォードなどの自動車メーカーでは、ロボットアームに取り付けられたグリッパーを使用して、部品の組み立てや運搬を行っています。これにより、作業の精度向上と作業員の負担軽減が実現されています。
活用事例
- ボルト締結作業
ボルトを締める作業においては、エンドエフェクタに組み込まれたトルク管理機能により、適切な締め付けトルクが維持され、高い品質が保証されます。 - 溶接作業
自動車のボディ溶接などには、溶接トーチを搭載したロボットアームが利用されています。溶接トーチは高精度で強力な接合を提供し、大量生産を支えています。
2. 食品業界におけるエンドエフェクタの活用
食品業界では、特にピッキング作業や包装作業にエンドエフェクタが広く利用されています。
食品を扱う場合、衛生面での配慮が必要なため、エンドエフェクタの選定が重要です。真空グリッパーや吸着式グリッパーが使用されることが多く、食品の形状や素材に合わせた掴み方が可能です。
活用事例
- 食品のピッキング
工場の生産ラインでは、ロボットアームに取り付けた吸着グリッパーが箱詰め作業に使用されています。これにより、作業の高速化と効率化が実現し、人手不足の解消にも貢献しています。 - 包装作業
真空グリッパーを使用したロボットが食品の包装ラインで活躍しています。真空グリッパーは、食品の表面に密着して安定した保持力を発揮し、破損を防ぐため、デリケートな食品の取り扱いに最適です。
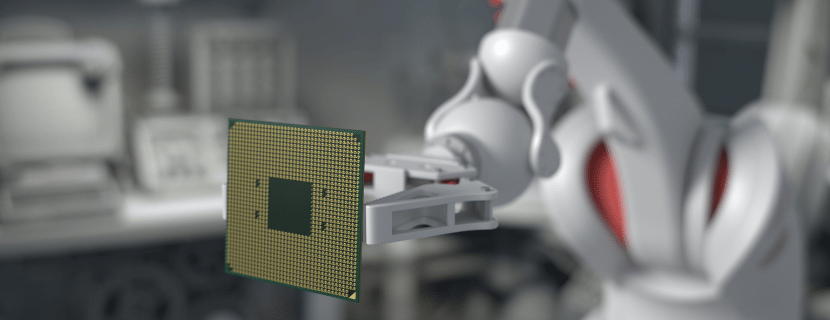
3. 電子機器業界におけるエンドエフェクタの活用
電子機器の組み立て工程では、精密な位置決めが求められます。
エンドエフェクタの中でも特にピックアンドプレースツールが多く使用され、基板のコンポーネント配置や、精密機器の組み立て作業を行います。これにより、生産性と精度が向上し、コスト削減が実現されています。
活用事例
- スマートフォンの組み立て
エンドエフェクタに取り付けられた小型グリッパーや吸着式グリッパーは、基板上のパーツを正確に配置する作業に使用されています。 - コンポーネントのテスト
エンドエフェクタは、製品のテスト工程にも使用されます。ロボットがパーツを適切に固定し、必要なテストを自動で実施することで、品質管理の効率化が図られています。
4. 医療分野におけるエンドエフェクタの活用
医療分野では、精密な操作が要求されるため、エンドエフェクタの精度と信頼性が重要です。特に手術支援ロボットでは、ロボットアームに取り付けられた精密グリッパーや工具ツールが手術をサポートします。
活用事例
- ロボット手術支援
医療用ロボットには高精度な手術ツールが搭載されており、微細な動きが可能です。エンドエフェクタは、内視鏡手術や精密な縫合を行う際に、医師の手元をサポートし、手術の精度と安全性を向上させます。 - 試薬の取り扱い
医療研究施設では、ロボットアームとエンドエフェクタを組み合わせて試薬の取り扱いや、試験管の操作が自動化されています。これにより、ヒューマンエラーを削減し、生産性の向上と品質の安定化を実現しています。
エンドエフェクタは、多種多様な業界で活用され、その性能が生産効率や品質、コストに直接影響を与えています。
自動車業界や食品業界、電子機器業界、医療分野などでの具体的な活用事例を通じて、エンドエフェクタの選定がいかに重要であるかがわかります。
適切なエンドエフェクタを選ぶことで、生産性の向上やコスト削減、品質向上が期待でき、特定の業界においては競争力を高める要素となります。
エンドエフェクタの選定は、業界や作業内容に応じて慎重に行うべきです。各種エンドエフェクタがどのように機能し、どのように効果を発揮するかを理解することで、より良い選択をすることができるでしょう。
ここまでで、エンドエフェクタの重要性や役割がざっくりイメージできたかと思います。次は、エンドエフェクタを種類ごとに詳しく見ていきましょう。
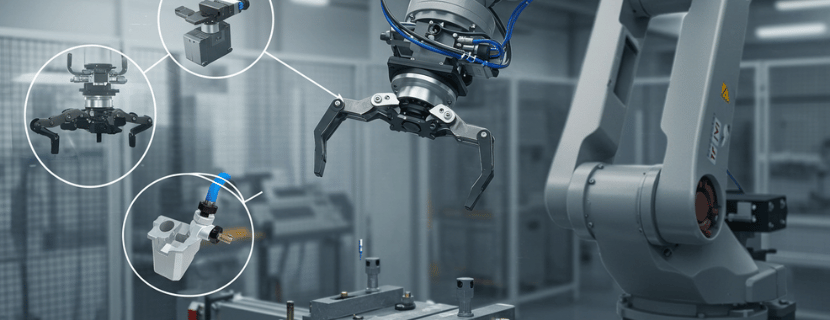
種類ごとにエンドエフェクタを解説
エンドエフェクタは大きく分けて、物を掴むための「グリッパー」と、物体を加工したり操作したりするための「ツール」の2種類に分類されます。
※上記クリックしますと、該当箇所に画面が移動します。
グリッパー
グリッパーは、物体を掴んだり、保持したりするためのエンドエフェクタです。
これらは物体を確実に握ったり、持ち上げたりすることが求められる場面で使用されます。グリッパーには、複数のタイプがあり、用途に応じて最適なものが選ばれます。
把持方式
把持方式とは、物体を物理的に掴んで保持する方法です。通常、2指や3指などの構成を使用して、物体の形状に応じて適切に掴むことができます。
吸着方式
吸着方式では、真空または圧力差を利用して物体を吸着することによって保持します。
磁力ハンド
磁力ハンドとは、強力な磁石を使用して金属製の物体を引き寄せる方法で物体を保持するグリッパーの一種です。
主に物を掴む特徴のあるグリッパーの種類は以上になります。次にツールの種類を確認しましょう。
ツール
ツールは、物体を加工したり、操作したりするために使用されるエンドエフェクタです。
これらは、物体を物理的に変更したり、特定の作業を行ったりする際に使用されます。ツールには、さまざまな種類があり、それぞれに特定の用途があります。
ドリル
ドリルは、穴あけ作業を行うためのツールです。
さまざまな材料に精密に穴を開けることができ、製造業や建設現場などで頻繁に使用されます。
溶接トーチ
溶接トーチは、金属部品を溶接するためのツールで、特に自動車産業や製造業で重要な役割を果たします。溶接の種類によって使用される溶接トーチも異なります。
ペイントスプレーガン
ペイントスプレーガンは、塗装やコーティング作業を行うためのツールで、特に自動車や家電の製造ラインでよく使用されます。
切断ツール
切断ツールは、物体を切るためのツールで、特に金属やプラスチック、木材などを効率的に切断する際に使用されます。
ネジ締めツール
電動または空圧ドライバと自動ねじ供給器を一体化したエンドエフェクタです。
インパクト(パルス)締めツール
内部ハンマーやオイルパルス機構により高トルクを瞬間的に発生させるエンドエフェクタです。
ボルト(ナットランナー)締めツール
サーボモータとトランスデューサを内蔵し、0.1–5000 Nmの広範囲を高精度に制御する電動/空圧ナットランナーです。
【その他】専用ハンドと汎用ハンド
最後に、専用ハンドと汎用ハンドについて解説します。
専用ハンド
専用ハンドとは、特定の作業や物体に最適化されたエンドエフェクタです。特定の用途に特化しているため、効率的に作業を行えますが、他の用途には適応しにくいという特徴があります。
汎用ハンド
汎用ハンドとは、複数の用途に対応できるように設計されたエンドエフェクタです。柔軟性が高く、多用途に使用できますが、専用ハンドに比べて特定の作業における効率が劣ることがあります。
ここまで、エンドエフェクタの種類について、大きくグリッパーとツールに分けて解説しました。
次にエンドエフェクタの選び方を確認しましょう。
エンドエフェクタの選び方を解説
エンドエフェクタを選ぶ際には、多角的な視点から検討しなければなりません。以下では、代表的な3つの選び方を順にご紹介します。
可搬重量と可動ストローク
エンドエフェクタの選び方として、扱うワークの質量や形状に応じた余力のある可搬重量と、十分な可動ストロークを持つかという視点があります。
これはワーク重量や寸法、ロボット本体との取り付け位置、そして動作時の加速度といった要因によって変動します。
もし許容量を超える負荷やストローク不足のまま運用すると、動作不良や部品破損を招き、生産ラインにトラブルを起こしかねません。
また、ワークサイズや質量がまちまちで生産ラインの汎用性を高めたい場合には、特に重視したい要素です。
こうした要件を満たすエンドエフェクタを導入すれば、作業領域やワークバリエーションが拡大し、さまざまなタスクに柔軟に対応できるようになるでしょう。
センサーとコントローラ連携
接触力や位置検知、異常検知などのセンサー機能を備え、コントローラとの連携性が高いかどうかも重要です。
これはワークの精密度合いや位置合わせ精度、要求される品質レベルによって、求められる機能が大きく変わります。
もし適切なセンサーや制御がない状態で運用すれば、ワークのズレや異常を見落として品質不良や装置トラブルを発生させてしまうリスクが高まるでしょう。
特に高精度な位置決めや異物混入検知など、微細な不具合も許されない工程では慎重な検討が必要です。
逆にセンサー・コントローラ連携をしっかりと確保することで、リアルタイムに状態を把握しつつ安定した作業を行えるため、生産効率と品質を同時に高めることが期待できます。
取り付け容易性と互換性
最後に紹介するエンドエフェクタの選び方は、ロボット本体への取り付けが容易かどうか、標準化されたコネクタや通信規格に対応しているかです。
これは、使用するロボットメーカーや制御方式、電気・空圧配管の仕様との互換性によって左右されます。
もし互換性がないエンドエフェクタを導入すると、ライン変更や修理の度に改造や追加コストが発生し、結果的に生産性を下げる恐れがあります。
製造ラインを定期的に組み替えたり、異なるロボットを併用する現場ではこの選定項目が特に大切でしょう。
一方で、取り付け容易性と互換性を確保していれば、生産ラインのレイアウト変更や機種追加の際にもスムーズに対応でき、長期的な運用コストを削減できる可能性が高いです。
エンドエフェクタ選定の追加ポイント(2026年版)
- 衛生・法規・規格対応:食品接触材の適合、クリーンルーム(ISO Class)、ESD対策など業界要件を事前確認。
- 安全規格とリスクアセスメント:協働ロボット適用時は力・圧力・形状(鋭利部)のリスク低減策と評価をセットで。
- 通信・データ連携:IO-Link、EtherNet/IP、PROFINET 等の対応。結果ログ・診断データで予防保全と品質保証。
- クイックチェンジと互換性:ツールチェンジャで段取り時間短縮。フランジ規格やI/O配列の標準化で多機種運用を容易に。
- 環境条件と保護等級:粉塵・油ミスト・洗浄・高低温に対するIP等級、防錆・防油・防塵設計を吟味。
- 保守性・消耗品とTCO:パッド・爪・刃物など消耗品の交換周期/入手性、分解整備性、保守体制を確認。
ワンポイントアドバイス:最適な選定のための追加チェックリスト
✅ 1. 使用環境への適合性(環境耐性)
クリーンルームは低発塵仕様、食品・薬品は洗浄しやすいステンレスや高IP等級、薬品・温度条件も事前確認を。
✅ 2. 協働運用時の安全性
角の面取り・挟み込み防止構造・力制限などに配慮。関連規格(例:ISO/TS 15066)の考え方に沿った設計が安心です。
✅ 3. 将来拡張性
指先アタッチメント交換や自動ツールチェンジャを前提にすると、多品種少量やライン変更にも強くなります。正直なところ、ここを最初に織り込むかどうかで、1年後の柔軟性が大きく変わります。
ここまでで、エンドエフェクタを選ぶ際の大切なポイントを3つご紹介しました。次は、具体的にどのメーカーがどのような強みを持っているのか、より実践的な情報を見ていきましょう。
エンドエフェクタのおすすめメーカーを紹介

この章では、JET-Robotics編集部ピックアップのエンドエフェクタのおすすめメーカーを紹介します。メーカーの概要から独自技術、製品の強みまで取り上げますので、ぜひ参考にしてみてください。
気になるメーカーや製品があり、話を聞いてみたいという方は、以下のボタンよりお問い合わせください。
※JET-Roboticsの問い合わせフォームに遷移します。
※一部メーカーとは提携がない場合がありますが、ユーザー様に最適なご案内ができるよう努めています。
- パナソニック エレクトリックワークス / Panasonic Electric Works
- トークシステム / Talk System
- 富士精工 / FUJI SEIKO
- バンガードシステムズ / Vanguard Systems
- 小倉クラッチ / Ogura Clutch
- シナノケンシ / Shinano Kenshi
- 北川鉄工所 / Kitagawa Corporation
- シュンク・ジャパン / SCHUNK
※クリックで各メーカーの詳細に飛べます。
パナソニック エレクトリックワークス / Panasonic Electric Works
| 会社名 | パナソニック エレクトリックワークス / Panasonic Electric Works |
| 設立年 | 2021年 |
| 本社 | 大阪府門真市大字門真1048番地(大阪本社) 東京都港区東新橋一丁目5番1号(東京本社) |
| 概要 | 「くらしの空間」における電気設備分野に関する事業など |
パナソニック エレクトリックワークスは、2021年に設立された、パナソニックのグループ会社です。特に電気設備の分野で住宅、オフィス、ホテル、商業施設、スポーツ施設など、社会を構成するあらゆる「くらしの空間」で事業を展開しています。
工場内の協働・産業ロボット用インパクトレンチ「ロボテックインパクト」を開発・製造しています。M8~M10のボルト締めが可能なロボテックインパクトは工場内の人手不足解消策として提案されている製品です。
インパクト打撃式のため、反力が小さく、ロボットへの負荷が少ないほかに、3kg可搬の小型協働ロボットにも対応しているため、コストの抑制にもつながることが特徴です。
2024年に販売開始された製品ですが、2025年(執筆時点)までに自動車ユニット工場のサブラインへの導入実績があります。
トークシステム / Talk System
| 会社名 | トークシステム / Talk System |
| 設立年 | 1987年 |
| 本社 | 東京都港区芝浦二丁目12番10号 THKビル 2階 |
| 概要 | 機械要素部品の卸・小売販売 機械要素オリジナル製品の設計・販売 |
トークシステムは、1987年に設立された、機械要素部品の卸・小売販売を行う会社です。代理店の機能を持ちながら、自社による機械要素オリジナル製品も設計・販売しているところが特徴です。
同社はロボットハンドの部品としても使用できる、「クイッククランパーシリーズ」を販売しています。直線移動の(アン)クランプを力を入れずにワンタッチで行えるロック機構です。
かんたんな操作で一定した保持力を発揮してくれるほか、固定されている間は電気やエアによる動力は不要なので、停電してもワークが落下する心配はありません(把持するタイプの場合)。トークシステムはニーズにあわせてロボットハンドの設計から行ってくれます。
クイッククランパーの使用の具体例としては、ワークの把持、高さ調整、位置決め、Z軸の落下防止、ロボットハンドなど、さまざまです。
富士精工 / FUJI SEIKO
| 会社名 | 富士精工 / FUJI SEIKO |
| 創立年 | 1958年 |
| 本社 | 愛知県豊田市吉原町平子26番地 |
| 概要 | 超硬工具、ダイヤモンド工具、その他切削工具、工具保持具及び治具の製造販売、産業用機械設備及びその部品並びに附属品の製造販売など |
富士精工は工具に関わるあらゆる仕事をサポートするツールエンジニアリングカンパニーとして、ドイツのマイスター制度にならって「日本一(富士)精密工具(精工)をつくる」という志のもと、創業以来精密工具分野における「ものづくり」を通じて、産業界や地域社会の発展に貢献しています。
エンドエフェクタとして、「フローティング式バリ取りハンド」や「ATCスタブホルダ」などを取り扱っています。前者は高フロートによりティーチングに要する時間を削減し、軽量ボディで可搬重量が小さいロボットアームにも対応しています。後者は複数のハンドチェンジャー不要で投資削減に貢献、動力源不要で簡単ツールチェンジが可能な点が特徴です。
フローティング式バリ取りハンドは複雑なワークでも追従し安定してバリを除去することが可能で、ティーチングに要する時間を削減します。ATCスタブホルダはスピーディーなツールチェンジができ、「生産性向上」「投資削減」「多品種対応」に貢献します。90%オーダーメイドで作成しており、ワークに応じたエンドエフェクタをご提案します。詳しくはお問い合わせください。
バンガードシステムズ / Vanguard Systems
| 会社名 | バンガードシステムズ / Vanguard Systems |
| 設立年 | 1986年 |
| 本社 | 埼玉県所沢市東所沢1-27-23 |
| 概要 | モーションコントロール製品を主体とした各種ドライバ・コントローラおよび応用製品の開発・製造・販売、テーピングマシンの開発・製造・販売・テーピング加工及び外観検査サービス |
バンガードシステムズは、テーピング技術や独自のモータ制御技術を応用した精密電動ドライバーを軸に、製品開発と加工サービスの両面から製造現場の品質向上と省力化に貢献する企業です。
「PRO-FUSEシリーズ」は、ロボット搭載を前提に設計された小型・軽量の電動ドライバーです。独自のモータ制御技術により高精度なトルク管理を実現し、微細ねじの安定締結に最適です。各種ロボットメーカーに対応し、自動化と品質向上に貢献します。
精密機器や電子機器をはじめ、医療機器や自動車業界で採用実績が多数あります。制御性とトレーサビリティに優れ、mN・mレベルの微細制御により樹脂やアルミなど多様な材質に対応し、安定した高品質な締結を実現します。
小倉クラッチ / Ogura Clutch
小倉クラッチは、摩擦と磁力の2つの技術を駆使した豊富な製品開発力と85年以上の技術経験を持っています。同社はOGRシリーズというロボットハンドを手掛けています。内部に把持力のセンシング機構を組み込むことで、一般的な電流制御よりも、高精度かつ経時的にも信頼性が高い制御機構を搭載しているのが特徴です。
シナノケンシ / Shinano Kenshi
シナノケンシは、モータの開発・製造・販売を担うメーカーで、コーポレートブランドはASPINA(アスピナ)です。エンドエフェクタは「ASPINA電動ロボットハンド」を開発しており、コンパクトなサイズながら大きな開口径を実現しています。ひとつのハンドでさまざまなワークに、幅広く対応可能な点が魅力で、生産現場の効率化に貢献します。
北川鉄工所 / Kitagawa Corporation
北川鉄工所は、建設、産業、工作機械などさまざまな分野に展開しているメーカーです。同社のエンドエフェクタは、工作機械をチャック製造で培った技術を応用したロボットハンドで、高把力、高精度、優れた耐久性が特徴です。「NTS2シリーズ」は、従来品より切粉対策強化とメンテナンス性の向上をし、軽量短寸ボディを実現しています。
シュンク・ジャパン / SCHUNK
シュンク・ジャパンは、ドイツに本社を置く日本法人です。同社は空圧、電動、マグネットグリッパーから、粘着式、特殊グリッパーまで4800種類以上のバリエーションを提供しています。「Co-act」シリーズはドイツDGUV認定を受け、最高の安全性と高度なグリップ技術を提供しています。
導入などでお困りでしたら以下からお気軽にご相談ください。
※JET-Roboticsの問い合わせフォームに遷移します。
一部の会社とは正式な提携がない場合がありますが、皆さまに最適なご案内ができるよう努めています。