【2026年最新】インフラ点検ロボットとは? 細かい種類分けや現状の課題、おすすめメーカーを紹介
インフラ設備の老朽化が進む中、従来の人手による点検には限界が見え始めています。高所や狭隘部、水中といった危険・困難な現場で、安全かつ効率的に点検を行う手段として注目されているのが「インフラ点検ロボット」です。
しかし、種類も用途も多様な中で、自社に最適なインフラ点検ロボットをどう選べばいいのか、具体的な導入事例やメーカー比較情報もなかなか集めづらいのが実情ではないでしょうか。
本記事では、インフラ点検ロボットの基本情報から種類別の特徴、選び方、導入時の課題、おすすめメーカーまでを体系的に解説します。自社に最適な点検手段を見つけたい方は、ぜひご一読ください。
インフラ点検ロボット以外にも、点検ロボットには、プラント点検ロボットや床下点検ロボット、狭小空間点検ロボット等があります。点検ロボット全般について詳しく知りたい方は、以下の記事をご覧ください。
インフラ点検ロボット全製品(4件)
 タイル形式
タイル形式 リスト形式
リスト形式
1-4 / 4件



| 製品 | 詳細情報 |
|---|---|
|
🏆注目
200人が閲覧しました
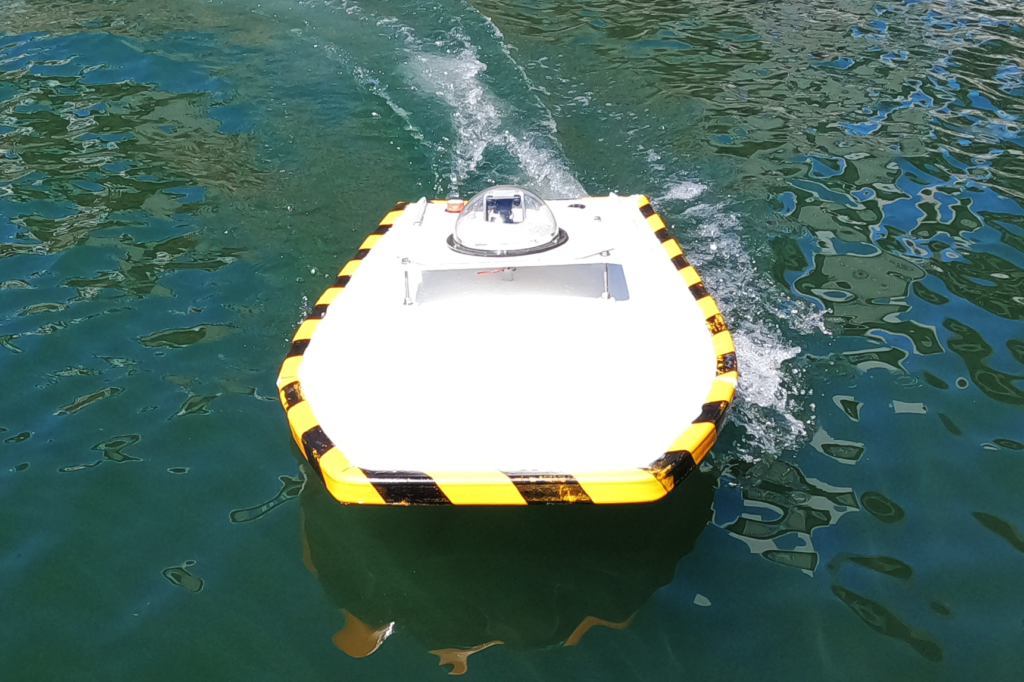
メーカー:炎重工株式会社特徴:調査・点検業務の省人化・自動化をサポート、担当職員の安全を確保しながら地域の水インフラを維持管理 流水の有無にかかわらず、水位のある下水道など管渠・暗渠において、管内への立ち入りを最少限にして、作業員の安全確保と調査・点検の効率化に貢献 小型・軽量、1人で持ち運べる水上ドローンであれば、少人数で現場へ赴き、すぐに調査・点検が可能 |
|
|
🏆注目
187人が閲覧しました
メーカー:炎重工株式会社特徴:機器を載せ、流れの早い河川を進む・ダム対岸へ素早く移動するなど、幅広い環境の測量・調査・点検を行える 機動力+積載重量10kgのパワーで現場作業員の活躍を後押し 無線・有線での遠隔操作、自動航行に対応 |
|
|
🏆注目
207人が閲覧しました
メーカー:炎重工株式会社特徴:1つの河川や堰・用水路にかかる複数『小規模橋梁』の点検を、この1台で 水中生物を傷つけない、藻が絡むことのないプロペラ式 水深10cm~の水域で使用可能 |
|
|
221人が閲覧しました
メーカー:炎重工株式会社特徴:マンホールから投入し、管の外から遠隔操作 流量や土砂の堆積量・水深が異なる下水道管内をこの1台でシームレスに走行・点検、業務改善・作業員の安全性向上に貢献 |
1-4 / 4件
導入などでお困りでしたら以下からお気軽にご相談ください。
※JET-Roboticsの問い合わせフォームに遷移します。
一部の会社とは正式な提携がない場合がありますが、皆さまに最適なご案内ができるよう努めています。
インフラ点検ロボットの基礎知識や導入のポイントについては、以下の解説をご覧ください。
インフラ設備の老朽化が進む中、従来の人手による点検には限界が見え始めています。高所や狭隘部、水中といった危険・困難な現場で、安全かつ効率的に点検を行う手段として注目されているのが「インフラ点検ロボット」です。
しかし、種類も用途も多様な中で、自社に最適なインフラ点検ロボットをどう選べばいいのか、具体的な導入事例やメーカー比較情報もなかなか集めづらいのが実情ではないでしょうか。
本記事では、インフラ点検ロボットの基本情報から種類別の特徴、選び方、導入時の課題、おすすめメーカーまでを体系的に解説します。自社に最適な点検手段を見つけたい方は、ぜひご一読ください。
※JET-Roboticsの問い合わせフォームに遷移します。
一部の会社とは正式な提携がない場合がありますが、皆さまに最適なご案内ができるよう努めています。
インフラ点検ロボット以外にも、点検ロボットには、プラント点検ロボットや床下点検ロボット、狭小空間点検ロボット等があります。点検ロボット全般について詳しく知りたい方は、以下の記事をご覧ください。
目次
最近の更新内容
2026/1/22更新 企業情報の更新
2026/3/5更新 コンテンツの一部修正と追加
【2026年最新】インフラ点検ロボットの市場動向とアップデート
導入を成功させるには、いま現場で起きている変化を押さえておくことが近道です。ここでは直近の要点だけをギュッと整理しました。
トレンド1:インフラDXと法規制の進展
- ドローンのレベル4飛行(有人地帯での目視外飛行)解禁により、都市部橋梁や配電網の点検が現実解に。運用設計時は航空法(許可・承認、機体登録・リモートID、技能証明)を前提化。[1]
- トンネル・プラントなど非GPS環境では、Visual SLAMやビーコンの併用が一般化し、フェールセーフ(自動停止・姿勢保持)要件が重視されています。
トレンド2:AI解析とデジタルツインの活用深化
- ひび・剥離の自動検出から、重要度判定・劣化進行の予測へ。AIの検出定義や精度指標、再学習ログの提示が求められる場面が増加。
- 点群・画像を時系列で管理するデジタルツイン連携により、修繕計画の精度が向上。提出データの再現性・トレーサビリティが評価軸に。
トレンド3:補助金活用と領域拡大、RaaSの普及
- 導入時は各種補助制度(例:ものづくり補助金等)の公募要領を確認し、初期負担を軽減。
- 洋上風力・大規模プラント・広域配管など新領域の案件が拡大。機体+クラウド解析+保守教育を包括するRaaS(ロボティクス・アズ・ア・サービス)も選択肢に。
インフラ点検ロボットとは? 特徴や活用例を紹介
インフラ点検ロボットとは、トンネル・橋梁・配管・ダムなどの社会インフラに対し、異常や劣化の兆候を検知するために使用されるロボットです。人手による点検では対応が難しい場所や高所、閉所、水中などにも対応できます。
インフラ点検ロボットの導入が進む背景は、インフラの老朽化が進み、保守・点検の需要が急速に高まっていることです。とくに高度経済成長期に整備されたインフラの耐用年数が迫っており、安全性確保と効率化を同時に実現する手段として注目されています。
技術的には、走行機構(クローラ、自律型車両、ドローン)、センシング技術(高解像度カメラ、LiDAR、赤外線センサー)、制御技術(AIによる異常検出、遠隔操作)などが複合的に活用されます。
インフラ点検ロボットの主な活用例は以下です。
- トンネル内壁のひび割れや水漏れの可視化
- 橋梁の支柱や床版の劣化診断
- ダムの水中壁面の損傷検出
- 配管内部の腐食・閉塞の発見
- 高所の電線や碍子の劣化状態の確認
これらのインフラ点検ロボットは、現場の安全性向上、点検精度の向上、作業の省人化を同時に実現するインフラ保守の中核的存在となりつつあります。
また、インフラ点検ロボットは、点検対象となるインフラ設備によってさらに細かく区分けできます。
次章では、インフラ点検ロボットの詳しい種類を見ていきましょう。
インフラ点検ロボットを種類別に紹介

インフラ点検ロボットは点検するインフラによって細かく種類分けできます。本章を読んで、自社が導入したいインフラ点検ロボットの種類を定めておきましょう。
トンネル点検ロボット
トンネル点検ロボットは、自走式の台車型やドローン型があり、トンネル内部の壁面や天井を撮影・測定することで、ひび割れ、水漏れ、剥離などの劣化兆候を検出します。センサーとしてはLiDARや高精細カメラ、音響センサーなどが使われます。
強み
- 照明が届かない暗所でも正確な点検が可能
- 長距離移動を前提とした構造で作業効率が高い
- 交通規制を最小限に抑えた点検が可能
弱み
- 段差や不整地の多い場所では移動困難なことがある
- LiDARやカメラの精度により精密な再現性に差が出る
橋梁点検ロボット
橋梁点検ロボットは、壁面吸着型、クローラ型、ドローン型などがあり、橋脚や床版、桁の表面や内部を点検します。磁力や真空吸着により垂直面でも走行できる機種が特徴です。
強み
- 高所作業や高架下など人がアクセス困難な箇所に対応
- 撮影・データ取得を短時間で広範囲に実施可能
- 小型ドローンにより上空からも接近可能
弱み
- 吸着力や風の影響により安定性が左右される
- 複雑な構造ではナビゲーションに調整が必要
配管点検ロボット
配管点検ロボットは、主に地中や建物内部に敷設された配管の内部を走行し、腐食やひび割れ、閉塞などの異常を検出するためのロボットです。車輪型やクローラー型、蛇型の自走式ロボットが一般的で、狭小空間に対応できるよう小型・軽量化されています。
強み
- 細径・複雑な配管内部にも進入でき、人的アクセスが困難な場所でも点検可能
- 映像やセンサー情報により、リアルタイムで劣化状況の把握ができる
- 非破壊で広範囲な配管内の調査が行える
弱み
- 水や異物が配管内に残っていると走行が妨げられる
- バッテリー容量や通信範囲に制約があり、長距離配管の点検には限界がある
- 配管の直径や形状によっては特注設計が必要な場合がある
電線点検ロボット
電線点検ロボットは、送電線や配電線などの電力インフラに沿って移動しながら、電線のたるみ、碍子の破損、金具の緩みなどを検出するロボットです。ドローン型やワイヤ走行型が主流で、高所での自律移動や安定撮影が可能です。
強み
- 高所作業の代替手段として、作業員の安全性を確保できる
- 送電を止めずに点検を実施でき、設備運用を妨げない
- 長距離点検でも飛行または走行で迅速に対応可能
弱み
- 風や雨など気象条件に大きく左右される
- 長距離飛行にはバッテリー管理や操縦支援が不可欠
- 鉄塔間の移動や入り組んだ配線には対応できないケースがある
ダム点検ロボット
ダム点検ロボットは、主に水中および壁面を対象とした構造点検を行う専用ロボットです。潜水型や吸着型の壁面走行ロボットがあり、水圧や水流に耐えられる設計が求められます。カメラ、超音波センサー、3Dスキャナなどを搭載し、ダム堤体のひび割れ、漏水、浸食などの異常を非接触で調査できます。
強み
- 人が潜れない深部や高水圧環境下でも点検が可能
- 高精度なセンシングにより早期劣化の兆候を検知できる
- 水を抜かずに定期点検が行えるためダム運用に支障を与えない
弱み
- 水中通信や遠隔操作には高度な技術が必要でコストが高い
- 機体の防水・耐圧構造が複雑でメンテナンス頻度が高い
- 点検データの分析や運用には専門的なノウハウが求められる
自社に導入すべきインフラ点検ロボットの種類は分かったでしょうか?もっと詳しいインフラ点検ロボットの選び方の解説に入る前に、次章で、インフラ点検ロボットが抱える課題を見ておきましょう。
導入前に知っておきたいインフラ点検ロボットが抱える課題

インフラ点検ロボットは、点検精度や作業効率の向上、作業者の安全確保といった多くのメリットを持つ一方で、導入・活用の面でいくつかの課題も抱えています。
まずインフラ点検ロボットの技術的な課題としては、センサー精度やAIによる自動解析の技術は年々進化していますが、対象インフラの材質や劣化状態、周辺環境の影響により、誤検出や検出漏れが生じる可能性が依然としてあります。
特に、GPSが届かないトンネル内や水中、磁場の影響が強い場所などでは、自律制御や位置特定が困難となり、ナビゲーション精度が低下する懸念があります。
次にインフラ点検ロボットの運用面の課題として、正しく操作・運用するには専門的な知識や技術が必要であり、現場でそれを担う人材の確保がハードルとなっています。
加えて、点検対象ごとにインフラ点検ロボットの仕様を最適化する必要があるため、汎用機の導入が難しく、現場ごとに個別対応を要するケースが少なくありません。
最後にコスト面の課題としては、インフラ点検ロボット本体の導入費用に加えて、継続的なメンテナンス、ソフトウェアの更新、オペレータの教育訓練などにも費用がかかる点が挙げられます。
特に中小規模の自治体や企業では、導入初期の資金負担やランニングコストがネックとなり、普及が進みにくい要因となっています。
こうした課題を踏まえつつ、導入効果とのバランスを見極めることが、インフラ点検ロボットの本格活用に向けた重要なステップといえるでしょう。
上記のような課題も理解したうえで、次章で解説するインフラ点検ロボットの選び方をもとに製品を選定していきましょう。
正しく効率的な点検を実現する製品の選び方を解説
先述したように、インフラ点検ロボットと一口にいっても様々な種類があるため、自社に適した製品を選べないと正しく効率的な点検作業は実現しません。
本章を読んで、自社の目的に合ったインフラ点検ロボットを導入できるようにしましょう。
点検対象インフラに特化したロボットを選ぶ
インフラ点検ロボットの選定ポイントとしてまず重要なのが、自社が点検したいインフラに適したロボットを選ぶことです。
例えば、橋梁・トンネル・配管・送電線など、対象インフラによって構造や材質、点検に求められるアプローチが異なるため、それぞれに特化したインフラ点検ロボットを選定する必要があります。
これを怠り、適合しないインフラ点検ロボットを導入してしまうと、走行不能や点検精度の低下といった問題が発生し、結果として作業効率が損なわれます。
特に、既に点検対象インフラが明確になっており、精密で専門性の高い診断が求められるケースでは、この選定基準の重要性は高まるでしょう。
適切なインフラ点検ロボットを選ぶことで、対象に応じた最適な点検が可能となり、品質を担保しながらもムダのないスムーズな運用が実現できます。
環境に適した移動機構を備えた製品を選ぶ
インフラ点検ロボットの選定においては、対象環境に最適な移動機構を備えているかどうかも判断材料となります。
トンネル内の長距離移動には自走型、橋梁の下面には反転走行型、配管外周には磁力吸着型、高所作業にはドローン型など、走行面の材質や勾配、空間の広さ、障害物の有無といった物理的条件によって適切な移動方式は異なります。
もしこの点を軽視して不適切なインフラ点検ロボットを選ぶと、転倒・脱落・移動不能といったトラブルが発生し、点検作業自体が中断する危険があります。特に高所や狭所、閉鎖空間など人が入りにくい環境では、移動性能の選定が作業の安全性と継続性を左右するでしょう。
一方で現場に最適な移動機構を持つインフラ点検ロボットを導入すれば、無理なく点検ルートをカバーでき、安定した作業が可能になるとともに、作業効率も向上します。
出力形式や解析機能に対応した製品を選ぶ
インフラ点検ロボットの導入時には、点群データやHD動画、AI解析付き画像などの出力形式や、損傷レベルの自動分類といった解析機能の有無も選定ポイントとなります。
これは、報告書のフォーマットや保守履歴システム、また自治体やクライアントが求める提出形式といった、後工程での業務フローに密接に関係してくるからです。
対応していない形式のデータしか出力できないインフラ点検ロボットを選んでしまうと、手動での変換作業やファイル管理の煩雑化が生じ、点検後の業務効率を損なうことになります。
特に複数現場を担当している企業や、発注元から厳密な報告書提出を求められる場面では、この観点が大切です。
あらかじめ目的に合った出力形式や解析機能を持つインフラ点検ロボットを選んでおけば、点検から報告、記録管理までのプロセスを効率化し、データの効率的な活用が可能になるでしょう。
選び方が分かったところで、次章ではJET-Robotics編集部がおすすめするインフラ点検ロボットメーカーを5社ピックアップして紹介します。
JET-Roboticsがおすすめするインフラ点検ロボットを提供するメーカー

本章を読んで、自社でメーカーや製品を選定する際の参考にしてください。また、仮に気になるメーカーがあれば問い合わせをしてみましょう。
※JET-Roboticsの問い合わせフォームに遷移します。
一部の会社とは正式な提携がない場合がありますが、皆さまに最適なご案内ができるよう努めています。
- 炎重工 / Homura Heavy Industries
- ジェーエフイースチール / JFE Steel
- 日立産業制御ソリューションズ / Hitachi Industry & Control Solutions
- エーシーエスエル / ACSL
※クリックで各メーカーの詳細に飛べます。
炎重工 / Homura Heavy Industries
| 会社名 | 炎重工 / Homura Heavy Industries |
| 設立年 | 2016年 |
| 本社 | 岩手県滝沢市穴口57-9 |
| 概要 | 「制御技術」を活用した屋外向け自動化製品 及び サービスの企画・開発・製造・販売・保守など 特に水辺の領域を得意とし、 水上ドローン (USV/ASV)、遠隔監視用水中カメラ、及び 生体群制御® など |
炎重工は、屋外環境に対する経験を生かし、生物の行動を制御する生体群制御、及び機械の動作を制御するロボット技術の開発を行っている会社です。これらの技術を組み合わせ、現場主義・実用志向にて一次産業における食料生産のデジタル化・工業化を進めています。
インフラ点検ロボットとして、「Swimmy Eye 下水道点検モデル」「ビート板型 水上点検ドローン(RBBG)」「双胴艇型 水上点検ドローン(RBOA)」「水陸両用走行型ドローン」を展開しています。たとえば、ビート板型 水上点検ドローン(RBBG)は、機器を載せ、流れの早い河川を進む・ダム対岸へ素早く移動するなど、幅広い環境の測量・調査・点検を行えます。また、水陸両用走行型ドローンはマンホールから投入し、管の外から遠隔操作が可能です。
ヒューム管・下水管・雨水管の点検のほか、幅広い環境の測量・調査・点検用途に使用することができます。搭載をご希望の機材・装置やご使用の環境・用途など、詳しくはお問い合わせのうえ、ご相談ください。
ジェーエフイースチール / JFE Steel
大型インフラの腐食診断技術に強みを持っている会社です。同社の配管を対象としたインフラ点検ロボット「Scan-WALKER」は、磁気吸着式クローラーを採用し、垂直・曲面などの鋼製構造物にも自在に追従可能です。また、リアルタイムで減肉を測定できる磁化渦流センサや超音波板厚計を搭載しており、点検箇所のカラーマップ表示によって異常を視覚的に把握できます。
日立産業制御ソリューションズ / Hitachi Industry & Control Solutions
社会インフラに対応した製品開発が強みの会社です。主力製品の「橋梁点検ロボットカメラ(HV-HT3100TBシリーズ)」は、最大10.5mまで伸縮可能なポールと高精細カメラを組み合わせ、地上から安全かつ高精度に橋梁を点検できます。遠隔操作が可能なタブレットPCや、クラックスケール機能付きの光学30倍ズームにより、作業効率と点検精度を両立しています。
エーシーエスエル / ACSL
ドローン本体から制御ソフトまで自社開発しており、用途に応じた専用機体を展開しているのが強みの会社です。主力のインフラ点検ロボットには「PF2」シリーズのほか、下水道・煙突点検向けの専用ドローンがあり、Visual SLAMを活用することで非GPS環境下でも安定した飛行が可能です。画像取得からクラウド保存・AI解析・レポート作成までを一貫して自動化可能で、現場作業と報告業務を効率化できます。
導入などでお困りでしたら以下からお気軽にご相談ください。
※JET-Roboticsの問い合わせフォームに遷移します。
一部の会社とは正式な提携がない場合がありますが、皆さまに最適なご案内ができるよう努めています。